Research
Directional Statistics
Robotic Beating Heart Surgery
see Robotic Beating Heart Surgery
SLAM
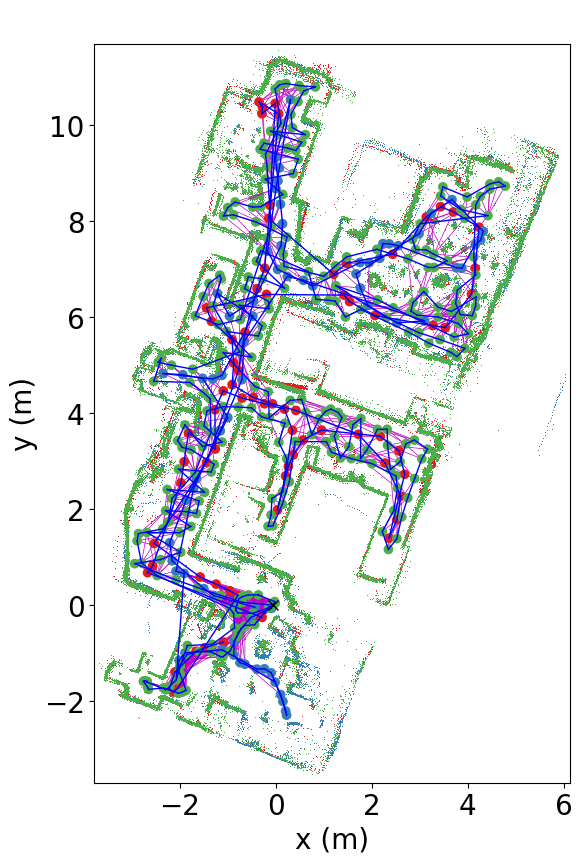
Simultaneous Localization And Mapping (SLAM) is a common problem in mobile robotics. While state-of-the-art approaches work well in some common scenarios, there is still a lot of ongoing research when it comes to challenging environments, dynamic scenarios, and other difficult cases.
- Dual quaternion particle filter (Li et al., 2018)
- Graph pruning (Kurz et al., 2021)
- Fusion of geometric lidar SLAM with reflective markers (Kurz et al., 2022)
- Detection of invalid map merges (Holoch et al., 2022)
Stochastic Control
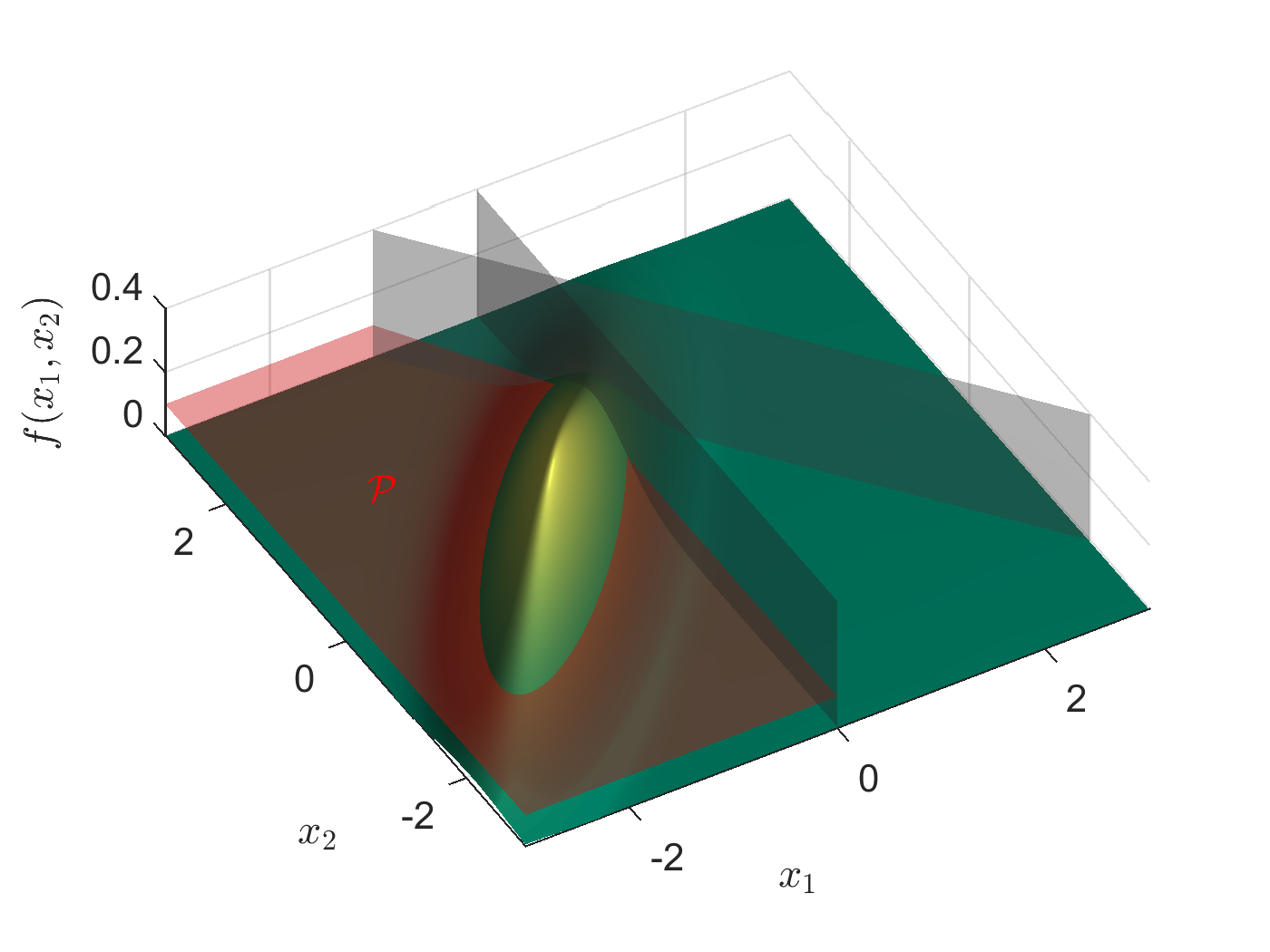
Unlike classical control, stochastic control takes uncertainties into account and models them as random variables that are distributed according to certain probability distributions. This involves a number of additional challenges.
In particular, I have worked on the following problems.
- Model-predictive control on the unit circle (Kurz et al., 2015)
- Chance-constrained control (Dolgov et al., 2015), (Kurz et al., 2016)
- Control of Markov Jump Linear Systems (MJLS) (Dolgov et al., 2016)
- Nonlinear optimal control (Dolgov et al., 2018)
Other Projects
- Stochastic Hybrid Systems (Dolgov et al., 2014)
- Mobile Robotics (Oberländer et al., 2011)
- Nonlinear Filtering (Kurz & Hanebeck, 2017), (Kurz & Hanebeck, 2018)
- Optical Belt Sorting (Pfaff et al., 2017)
- Machine Learning on Magnetic Resonance Spectroscopy (MRS) data (Lu et al., 2021), (Lu et al., 2023)
References
- Li, K., Kurz, G., Bernreiter, L., & Hanebeck, U. D. (2018, July). Simultaneous Localization and Mapping Using a Novel Dual Quaternion Particle Filter. Proceedings of the 21st International Conference on Information Fusion (Fusion 2018).
- Kurz, G., Holoch, M., & Biber, P. (2021). Geometry-based Graph Pruning for Lifelong SLAM. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 3313–3320. https://doi.org/10.1109/IROS51168.2021.9636530
- Kurz, G., Scherer, S. A., Biber, P., & Fleer, D. (2022). When Geometry is not Enough: Using Reflector Markers in Lidar SLAM. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 4880–4887. https://doi.org/10.1109/IROS47612.2022.9981522
- Holoch, M., Kurz, G., & Biber, P. (2022). Detecting Invalid Map Merges in Lifelong SLAM. 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 11039–11046. https://doi.org/10.1109/IROS47612.2022.9981564
- Kurz, G., Dolgov, M., & Hanebeck, U. D. (2015, July). Nonlinear Stochastic Model Predictive Control in the Circular Domain. Proceedings of the 2015 American Control Conference (ACC 2015).
- Dolgov, M., Kurz, G., & Hanebeck, U. D. (2015, December). Chance-constrained Model Predictive Control based on Box Approximations. Proceedings of the 54th IEEE Conference on Decision and Control (CDC 2015).
- Kurz, G., Dolgov, M., & Hanebeck, U. D. (2016, July). Progressive Closed-Loop Chance-Constrained Control. Proceedings of the 19th International Conference on Information Fusion (Fusion 2016).
- Dolgov, M., Kurz, G., & Hanebeck, U. D. (2016, December). Finite-horizon Dynamic Compensation of Markov Jump Linear Systems without Mode Observation. Proceedings of the 55th IEEE Conference on Decision and Control (CDC 2016).
- Dolgov, M., Kurz, G., Grimm, D., Rosenthal, F., & Hanebeck, U. D. (2018, June). Stochastic Optimal Control Using Local Sample-Based Value Function Approximation. Proceedings of the 2018 American Control Conference (ACC 2018).
- Dolgov, M., Kurz, G., & Hanebeck, U. D. (2014, June). State Estimation for Stochastic Hybrid Systems Based on Deterministic Dirac Mixture Approximation. Proceedings of the 2014 American Control Conference (ACC 2014).
- Oberländer, J., Harbaum, T., Kurz, G., Ahmed, N., Kos-Grabar, T., Hermann, A., Rönnau, A., & Dillmann, R. (2011). A Student-built Ball-throwing Robotic Companion for Hands-on Robotics Education. Proceedings of the 14th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR), 233–240. https://doi.org/10.1142/9789814374286_0027
- Kurz, G., & Hanebeck, U. D. (2017, December). Linear Regression Kalman Filtering Based on Hyperspherical Deterministic Sampling. Proceedings of the 56th IEEE Conference on Decision and Control (CDC 2017).
- Kurz, G., & Hanebeck, U. D. (2018, June). Improved Progressive Gaussian Filtering Using LRKF Priors. Proceedings of the 2018 American Control Conference (ACC 2018).
- Pfaff, F., Kurz, G., Pieper, C., Maier, G., Noack, B., Kruggel-Emden, H., Gruna, R., Hanebeck, U. D., Wirtz, S., Scherer, V., Laengle, T., & Beyerer, J. (2017, November). Improving Multitarget Tracking Using Orientation Estimates for Sorting Bulk Materials. Proceedings of the 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI 2017).
- Lu, D., Kurz, G., Polomac, N., Gacheva, I., Hattingen, E., & Triesch, J. (2021). Multiple Instance Learning for Brain Tumor Detection from Magnetic Resonance Spectroscopy Data. arXiv. https://doi.org/10.48550/ARXIV.2112.08845
- Lu, D., Kurz, G., Polomac, N., Gacheva, I., Hattingen, E., & Triesch, J. (2023, September). Advancing Brain Tumor Detection with Multiple Instance Learning on Magnetic Resonance Spectroscopy Data. Artificial Neural Networks and Machine Learning – ICANN 2023, 32nd International Conference on Artificial Neural Networks. https://doi.org/10.1007/978-3-031-44216-2_1